Si nos dicen que un coche circula durante una hora a 60 km/h no podemos saber en qué lugar se encontrará al cabo de ese tiempo porque no sabemos la dirección en la que ha viajado.
Hay muchas magnitudes físicas, como por ejemplo la velocidad, en las que hay que especificar una dirección para describirlas completamente. Por ejemplo, si sabemos que el coche anterior se movía hacia el Norte, ya no tenemos el problema de antes.
Por supuesto hay también muchas magnitudes, como la masa, que no dependen de la dirección. Así, diciendo que la masa de un cuerpo es 24 kg describimos completamente esta magnitud.
- Son escalares las magnitudes que se describen con un valor y una unidad .
- Son vectoriales las magnitudes que se describen usando un valor, una unidad y una dirección y sentido.
Las magnitudes vectoriales se representan a través de vectores, que tienen las siguientes características:
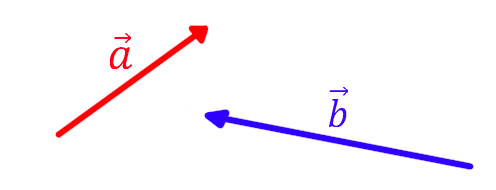
Una magnitud es vectorial cuando, para su completa definición, además del número y la unidad, se requiere conocer la dirección , el sentido que tiene y el punto donde se aplica.
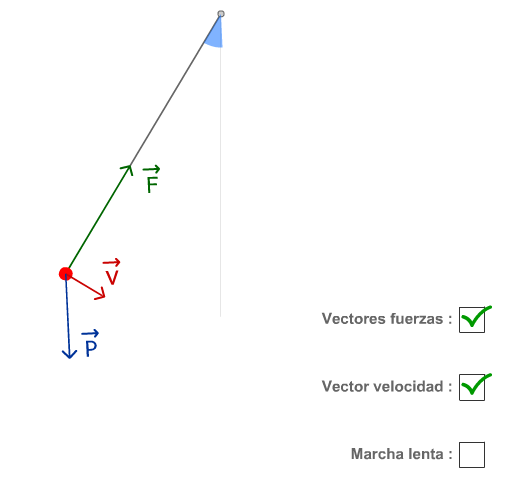
Velocidad, aceleración, fuerza, son ejemplos de magnitudes vectoriales.
En el siguiente enlace disponemos de Operaciones con vectores


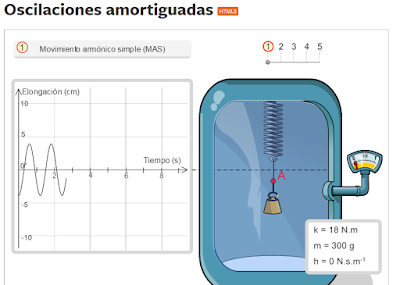












 sustituye al producto
sustituye al producto  , ya que la masa del oscilador y la pulsación son constantes. Por tanto,
, ya que la masa del oscilador y la pulsación son constantes. Por tanto,  y la frecuencia angular es:
y la frecuencia angular es:





